인간형 로봇, 휴머노이드 - 인공지능의 발전을 보여주는 상징
인간을 닮은 로봇

휴머노이드는 인간의 신체와 유사한 모습을 가진 로봇이다. 머리, 몸통, 팔, 다리 등 인간의 신체 구조를 따라 만들어지며, 인간의 행동을 가장 잘 모방할 수 있는 로봇이라는 점에서 인공지능 기술 발전의 중요한 지표로 여겨진다.
인간과 유사한 움직임의 어려움
휴머노이드는 인간과 유사한 움직임을 구현하기 위해 만들어진 로봇이다. 휴머노이드는 인간의 관절 구조를 연구하여 만들어진다. 하지만 인간과 동일한 관절을 가지고 있다고 해서 인간과 유사한 움직임을 구현하는 것은 생각보다 쉽지 않다.
인간의 움직임
- 다양한 관절: 인간은 360개 이상의 관절을 가지고 있으며, 각 관절은 서로 다른 방향으로 움직일 수 있다.
- 근육과 인대: 근육과 인대는 관절을 움직이고 균형을 유지하는 데 중요한 역할을 한다.
- 뇌와 신경계: 뇌는 근육과 인대를 정밀하게 조절하여 자연스러운 움직임을 가능하게 한다.
로봇 기술의 한계
- 센서: 로봇은 인간처럼 다양한 정보를 감지하지 못한다.
- 제어 시스템: 로봇의 제어 시스템은 인간의 뇌와 신경계만큼 정밀하지 않다.
- 동력: 로봇은 인간처럼 강력하고 효율적인 동력 시스템을 가지고 있지 않다.
인간의 관절 구조를 연구하여 로봇에 적용한다고 해도, 로봇이 인간처럼 자연스럽게 움직이고 균형을 유지하는 것은 기술적으로 매우 어려운 일이다. 특히, 인간처럼 넘어져도 다시 일어설 수 있는 로봇을 만드는 것은 아직 해결되지 않은 과제다.
- 균형 유지: 넘어지지 않고 균형을 유지하는 것은 매우 복잡한 과정이다.
- 넘어짐 감지: 로봇은 넘어지는 것을 미리 감지하고 대응하기 어렵다.
- 일어서기: 넘어진 후 다시 일어서는 것은 더욱 어려운 과제이다.
휴머노이드는 인간의 관절 구조를 연구하여 만들어진다. 하지만 인간과 동일한 관절을 가지고 있다고 해서 인간과 유사한 움직임을 구현하는 것은 생각보다 쉽지 않다.
4족 보행 로봇의 등장
이러한 어려움 때문에 대부분의 휴머노이드는 4족 보행 방식을 사용한다. 4족 보행은 2족 보행보다 안정적이고 균형을 유지하기 쉬우며, 로봇의 구조 또한 단순화할 수 있다. 하지만 4족 보행은 인간과 유사한 움직임을 구현하는 데에는 한계가 있다.
인공지능 기술의 발전을 보여주는 상징
인공지능 기술 발전은 휴머노이드 기술 발전에도 영향을 미치고 있다. 인공지능을 통해 로봇은 인간의 움직임을 학습하고, 상황에 맞는 적절한 행동을 취할 수 있다. 또한, 인공지능은 로봇의 균형 유지 및 제어에도 중요한 역할을 한다.
이처럼 휴머노이드는 인간의 움직임을 모방하고 학습하는 과정에서 인공지능 기술의 발전을 보여주는 상징적인 존재다.
인공지능은 휴머노이드에게 생명을 불어넣는 역할을 한다. 인간의 움직임을 학습하여 자율적으로 행동하도록 하는 기술은 휴머노이드를 더욱 발전시키고 있다.
세계적인 로봇공학 업체인 보스턴 다이나믹스의 휴머노이드와 BTS가 함께한 현대 자동차 광고를 통해 인간과 소통을 하는 휴머노이드를 재미있게 살펴 볼 수 있다.
Hyundai x Boston Dynamics | Welcome to the Family with BTS
https://www.youtube.com/watch?v=GJZeMgqQMjA
인공지능으로 내 동작 인식하여 따라하기
휴머노이드가 인간의 관절을 연구하며 움직임이 구현되었다면
내 동작을 인식하며 따라하는 프로그램을 통해 내 관절의 위치와 움직임과의 관계를 살펴 보자.
스크루블리
인공지능이 움직임 관찰을 통해 애니메이션을 제작하는 플랫폼 으로 웹캠만 있으면 전문적인 지식이나 코딩 없이 누구나 손쉽게 움직임 인식 및 따라하기 기능을 경험할 수 있다.
스크루블리의 작동 원리
스크루블리는 다음과 같은 단계를 통해 작동한다.
- 동작 인식: 웹캠을 통해 사용자의 동작을 촬영하고 인공지능 모델을 사용하여 동작을 인식한다.
- 스켈레톤 추출: 인식된 동작에서 25개의 관절점을 기반으로 스켈레톤을 추출한다.
- 움직임 매핑: 추출된 스켈레톤 정보를 사용하여 3D 캐릭터 또는 가상 객체에 움직임을 매핑한다.
- 렌더링: 움직임이 적용된 3D 캐릭터 또는 가상 객체를 화면에 렌더링한다.
사용방법
▶영어로! - Scroobly에서 'Start' 클릭 - Next 클릭 - Next 클릭 - 카메라 사용 허용 클릭
(1) 하단에 제시된 캐릭터 활용
▶ 캐릭터 선택 - 백그라운드(배경)을 활성화할 지 여부 선택
→ 적용된 그림이 내 움직임에 적용된다.
→ 배경을 활성화하면 나의 배경이 그대로 보여진다.
→ 배경을 활성화 하지 않으면 흰색 배경이 된다.
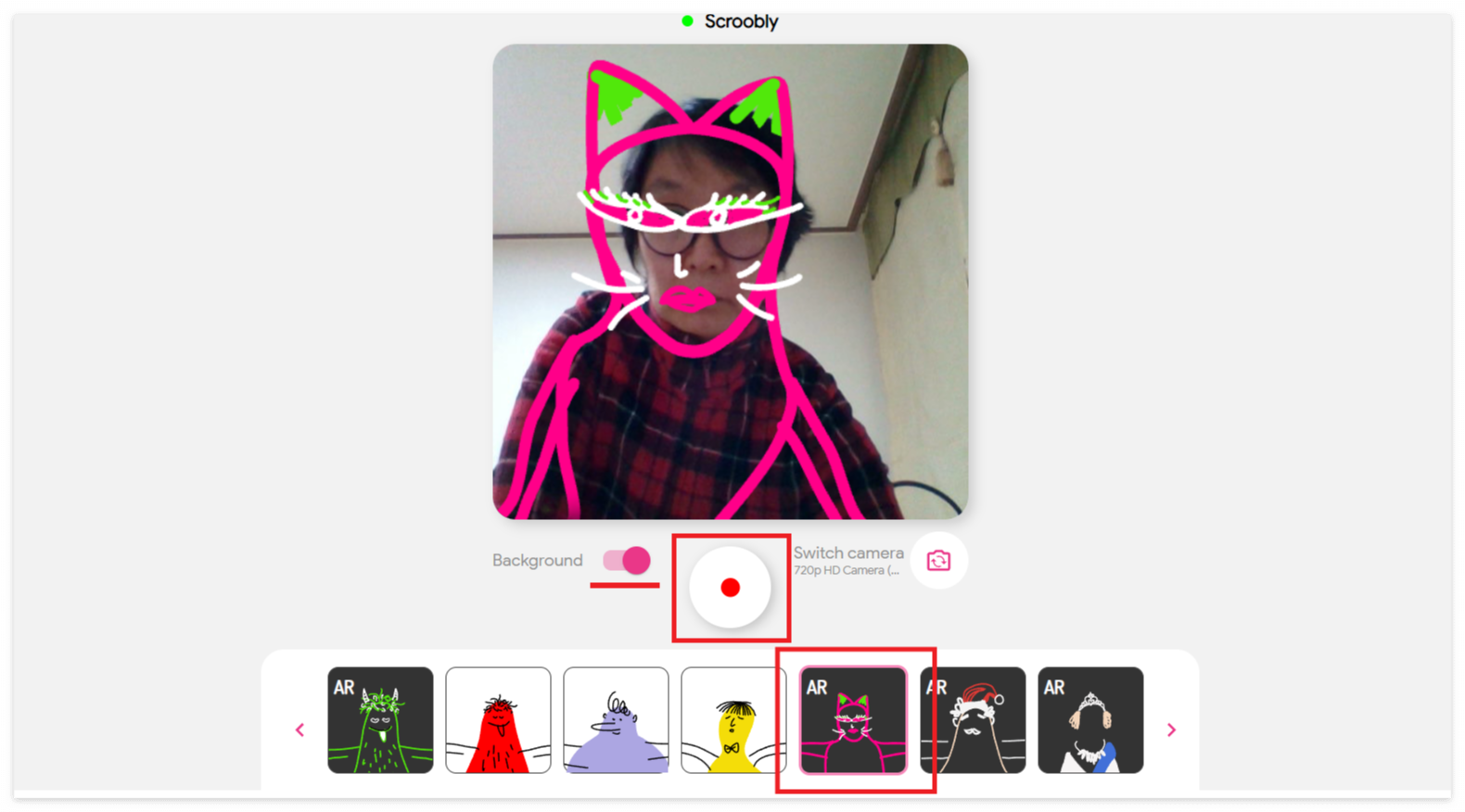
▶그림 선택과 배경이 결정되면 중앙의 빨간 버튼 클릭 - 움직이기
→ 내 동작이 적용된 그림이 15초 분량으로 녹화 된다.
→ GIF로 만들어진다.
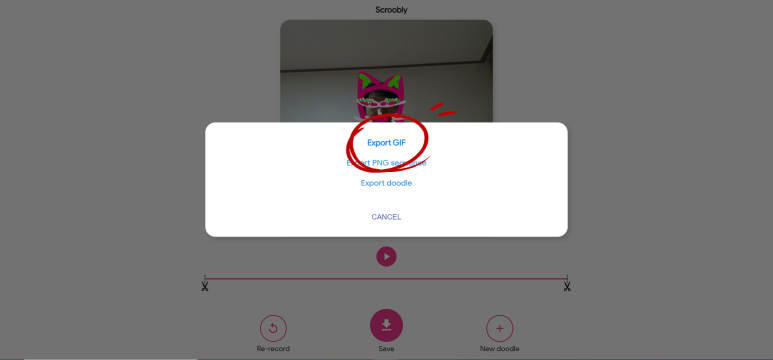
▶ 녹화가 끝난 후 Save - Export GIF 로 내보내기 한다.

↓ ↓ ↓
(2) 직접 캐릭터 그리기
▶ 아래와 같은 Scroobly 화면에서 캐릭터 바의 좌측 Make your own 클릭

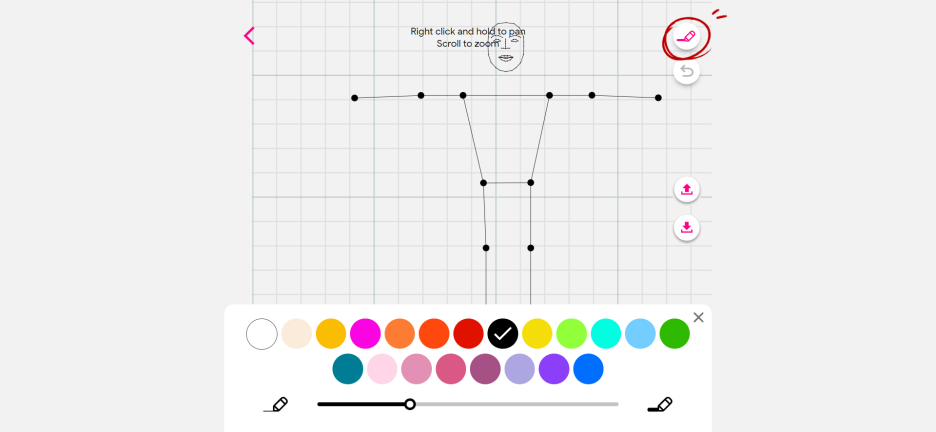
▶ 좌측의 Doodle your own 클릭

▶ 오른쪽 상단의 연필 클릭 → 골격을 포함하도록 하여 캐릭터를 그린다.
▶ 다 그린 후 Preview 클릭

▶ 이번에는 백그라운드를 비활성화 해보자 - Record 클릭 - 움직이기
→ 백그라운드를 비활성화 하면 하얀색 배경이 된다.

▶ 녹화가 끝난 후 Save - Export GIF 로 내보내기 한다.
↓↓↓
내 움직임을 따라 움직이는 그림
